自動駕駛汽車的工作原理可以分為兩個主要部分:感測和控制。
感測
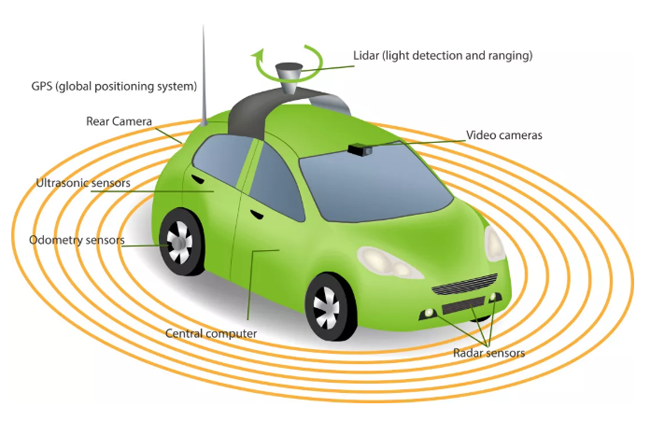
感測是指自動駕駛汽車對周圍環境進行感知的過程。自動駕駛汽車使用各種感測器來感知周圍環境,包括:
- 雷達:雷達可以探測到周圍物體的距離、速度和方向。
- 攝影機:攝影機可以感知周圍物體的形狀、大小和顏色。
- 光學雷達:光學雷達可以生成周圍環境的三維圖像。
- 超音波感測器:超音波感測器可以測量物體的距離。
這些感測器將收集到的數據傳輸給自動駕駛汽車的中央處理器。中央處理器將這些數據進行分析,生成一個對周圍環境的模型。

安裝在車輛上的一系列感測器技術(來源:Yole Développement)
控制
控制是指自動駕駛汽車根據感測到的環境信息,對汽車進行控制的過程。自動駕駛汽車的控制系統包括:
- 導航系統:導航系統可以指引汽車沿著預定的路線行駛。
- 車道保持系統:車道保持系統可以讓汽車保持在車道內行駛。
- 碰撞預警系統:碰撞預警系統可以提醒駕駛員或自動駕駛系統即將發生碰撞。
- 制動系統:制動系統可以讓汽車減速或停止。
控制系統根據中央處理器生成的環境模型,對汽車的方向盤、油門和剎車進行控制,讓汽車安全行駛。
邏輯方面的工作原理
自動駕駛汽車的邏輯方面的工作原理可以用一個簡單的類比來理解。
圖片來源: http://www.auttra.com/news/350.html
想像一下,你在駕駛汽車,你需要根據周圍的交通情況,做出一系列的駕駛決策,例如:
- 是否要變換車道?
- 是否要減速或停止?
- 是否要閃避障礙物?
這些決策都是根據你對周圍環境的理解做出的。自動駕駛汽車的邏輯系統也需要根據對周圍環境的理解做出決策。
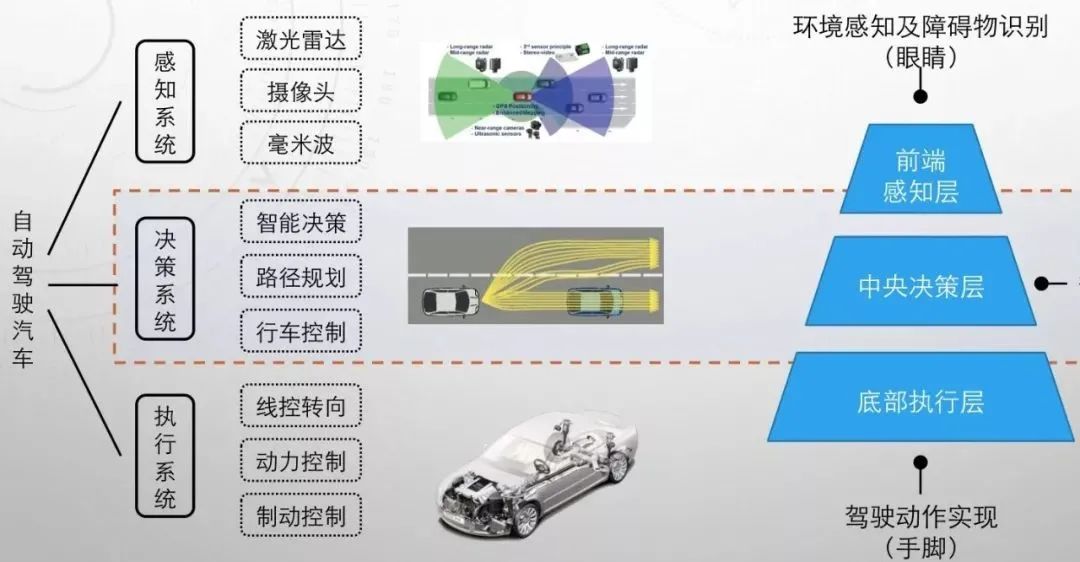
自動駕駛汽車的邏輯系統可以分為兩個主要部分:感知決策和控制決策。
感知決策
感知決策是指自動駕駛汽車根據感測到的環境信息,做出判斷的過程。例如,自動駕駛汽車需要判斷前方是否有車輛,是否有行人過馬路,是否有障礙物。
感知決策系統通常使用機器學習的方法來訓練。機器學習可以讓感知決策系統從大量的數據中學習,提高判斷的準確性。

圖片來源: https://www.nidec-components.com/cn/featuring/lidar-polygon/various-sensors/
控制決策
控制決策是指自動駕駛汽車根據感知決策的結果,做出控制指令的過程。例如,如果感知決策系統判斷前方有車輛,控制決策系統就會發出減速或停止的指令。
控制決策系統通常使用數學模型來計算控制指令。數學模型可以讓控制決策系統根據感測到的環境信息,做出最安全和最有效的控制指令。
圖片來源: https://www.graser.com.tw/news_others_LiDAR.htm
總結
自動駕駛汽車的工作原理可以分為感測和控制兩個主要部分。感測是指自動駕駛汽車對周圍環境進行感知的過程,控制是指自動駕駛汽車根據感測到的環境信息,對汽車進行控制的過程。
自動駕駛汽車的邏輯方面的工作原理可以用一個簡單的類比來理解。自動駕駛汽車的邏輯系統需要根據對周圍環境的理解做出決策,這一過程可以分為感知決策和控制決策兩個部分。
自動駕駛汽車的技術還在不斷發展,未來自動駕駛汽車將變得更加安全、更加高效。
|




 觀看 111
觀看 111